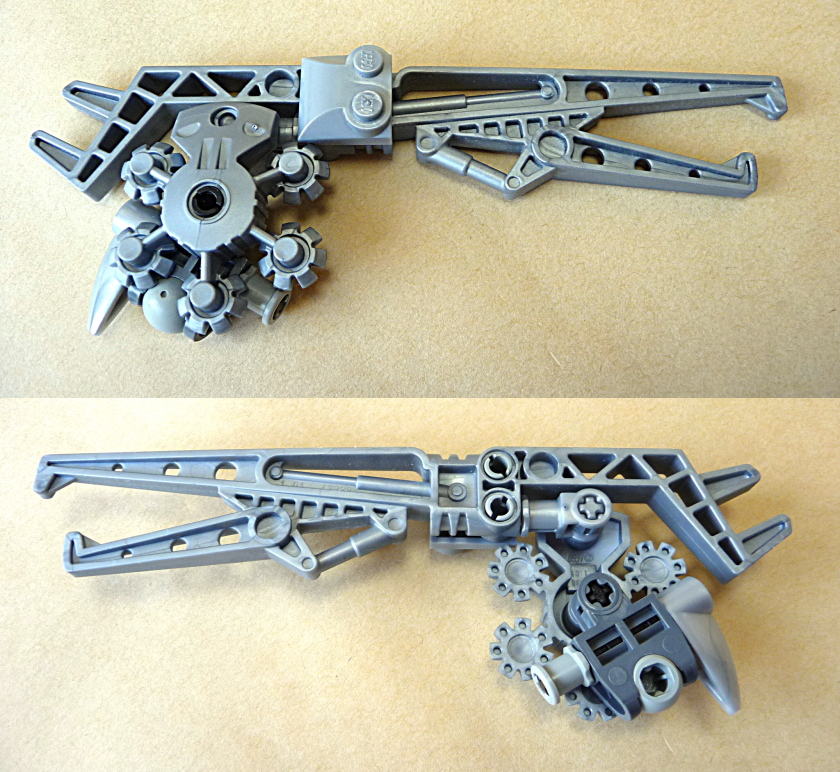
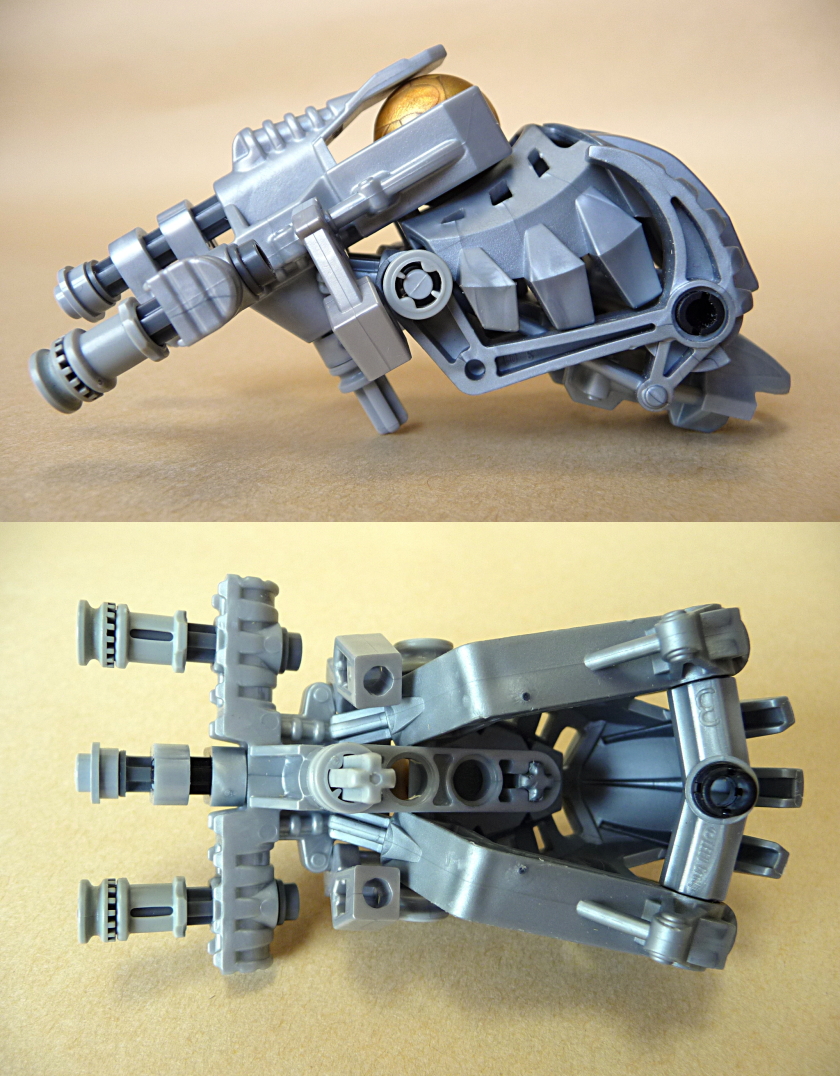
上体部分を、横と底から見た図。
ご覧のように、アボーキーを両側から挟み込んでいる1本爪の、根元の
軸はどこにもつながっていません。軸の手前にあるペグ穴に、丸棒を
通して、両端にハーフブッシュを取り付け、抜け防止としています。
ペグ穴にペグや軸を通すと、他のパーツに干渉してしまう場合、丸棒を
通せば、ミリ単位の融通が利くようになるので、たまに使う手法ですね。
一方、爪側のペグ穴は、アングルコネクタの3番を接続し、角度を出し
ます。このアングルコネクタを前後に回転させることで、爪と爪の間隔が
微妙に狭まることを利用して、アボーキーをホールドする強さを調整
しています。強くホールドできる角度で下半身(腹部のイニカアーマー。
底面の写真では取り外しています)と接続し、パーツ同士に隙間を作ら
なければ、結果的に、その角度で固定できるというわけです。
右の写真は、1本爪部分の構造を抽出したモデルです。
1本爪の軸部分を隠すために、サモラランチャーの両サイドをいわゆる
「ロボ腕」で装飾しています。ニクルパーツにはダンパーを模した意匠が
多く、その太さが丸棒と同じなので、システム系のクリップパーツで装飾
したくなってしまいますね。


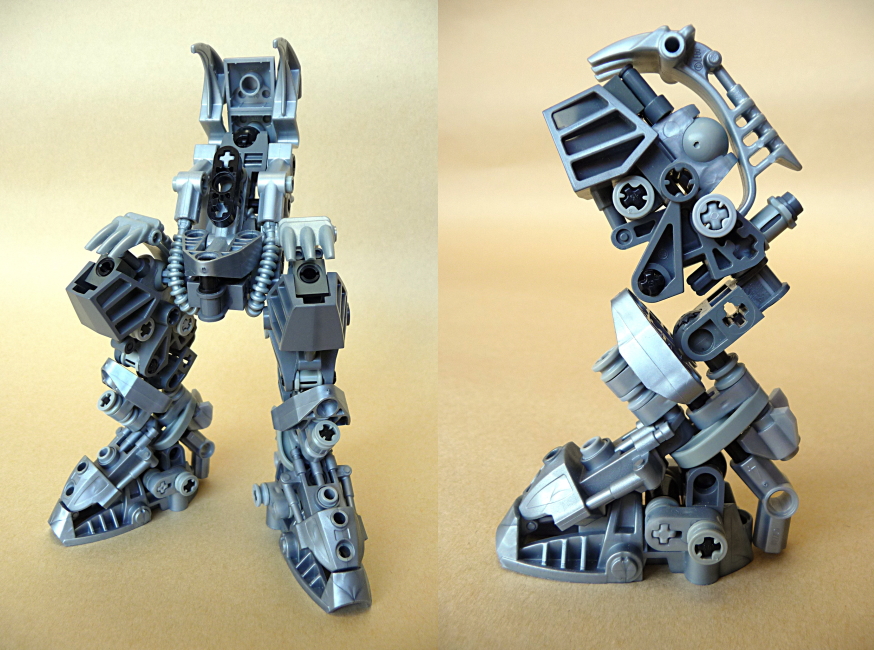
左は、上半身を取り外したところ。上半身との接続ポイントは、1×3×1/2リフトアームの軸穴1つのみ。
両脚は中央のTB受けに接続していますが、軸が見えているので、チューブで隠してあります。柔らかくて、蛇腹の密度も
高めのマーリ・チューブは、割と自在に使える役立ちパーツです。とりあえず、コレを付けておけばメカっぽさも出ますし。
足は、メトロ足の爪先とイニカアーマーの先端の幅がほぼ同じで、この角度で揃えると、アウトラインの曲線がつながる
ことを利用した一発ネタです。miznoさんからは「大河原メカ風の足ですね」とのコメントをいただきました(笑)。
メトロ脚の上にパーツを重ねる装飾は、キンブレイ2の方法論を一歩進めた感じになりました。とにかくイニカアーマーの
角度がポイントなので、例によってTBで調整の上、接続しています。あとは適度にボリュームを付けた感じ。
足が大きめだと、ちょっと見た目の安定感が増しますよねー。
逆脚に見えるラインは、それを狙ったわけではなくて、太股から爪先に向かって弧を描くようにしたかっただけです。
大抵のロボって、シュッと立った姿は、そういう脚のラインになっていると思うんです。
大腿部に初代トーア足というのは、本当に昔からやっている手法で、何ら弁解の余地はありません。
TB受けを初代トーア足の中央の軸穴に接続した場合、このサイズの作品では少し間延びした感が出てしまうため、
TB受けの軸穴部分を足側の中央の空間に差し込んで、2軸を通してその両端にハーフブッシュをつけることで、
ガタつきなく固定する方法をとりました。これも昔ながらです。
バラッキのアゴは、元々しなるように設計されたパーツなので、接続時に他のパーツに干渉しても、多少の無理が利く
ところが嬉しいです。サモラランチャーと共通の意匠を持っているので、どこかに使いたいと考えました。
腕。クレージーゴンの腕っぽいところが好きなパーツ(笑)。何をしでかすのか分かんなさそうで、脅威な感じ。
肩アーマーには、雪の結晶ような形の、コーワック・カルのシールドをチョイス。
本来ならば肩のTBに干渉するところですが、結晶の枝と枝の間なら干渉を免れます。故に、ダイヤル的に可動します。